-
Основен състав на индустриалните роботи
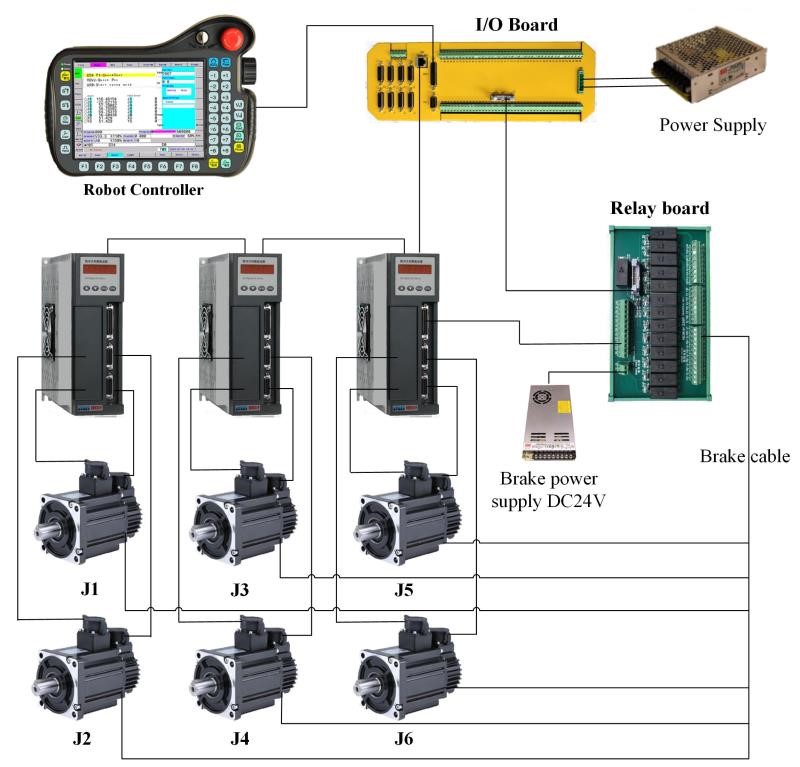
От гледна точка на архитектурата, роботът може да бъде разделен на три части и шест системи, от които трите части са: механична част (използвана за реализиране на различни действия), сензорна част (използвана за възприемане на вътрешна и външна информация), контролна част (Управлявайте робота за извършване на различни ...Прочетете повече -
Стратегия за умения за програмиране на CNC обработващ център
За CNC обработката програмирането е много важно, което пряко влияе върху качеството и ефективността на обработката. И така, как бързо да овладеете уменията за програмиране на CNC обработващи центрове? Да учим заедно! Команда за пауза, G04X(U)_/P_ се отнася за времето за пауза на инструмента (спиране на подаването, шпинделът ...Прочетете повече -

Седем технически акцента на тенденцията за развитие на CNC машинни инструменти в Китай.
Аспект 1: Сложните машинни инструменти са във възход. Благодарение на мощната способност за управление на CNC металорежещите машини от висок клас, все по-усъвършенстваната технология за проектиране и производство и все по-зрялата технология на приложение, включително програмиране, сложните машинни инструменти с тяхната мощност...Прочетете повече






